
Tuotteet


YST-125-kahvan moottoriavusteinen manipulaattori
Lyhyt kuvaus:
Tehoavusteinen manipulaattori, joka tunnetaan myös nimellä tasapainonosturi, on uusi teho-avusteinen laite materiaalinkäsittelyyn ja työvoimaa säästävään toimintaan asennuksen aikana.

Se soveltaa nerokkaasti voimatasapainon periaatetta, jotta kuljettaja voi työntää ja vetää painoa vastaavasti, minkä jälkeen se voi liikkua ja asemoida avaruudessa tasapainossa. Ilman taitavaa lenkkeilyä käyttäjä voi työntää ja vetää painavaa esinettä käsin ja painava esine voidaan sijoittaa mihin tahansa asentoon tilassa oikein.

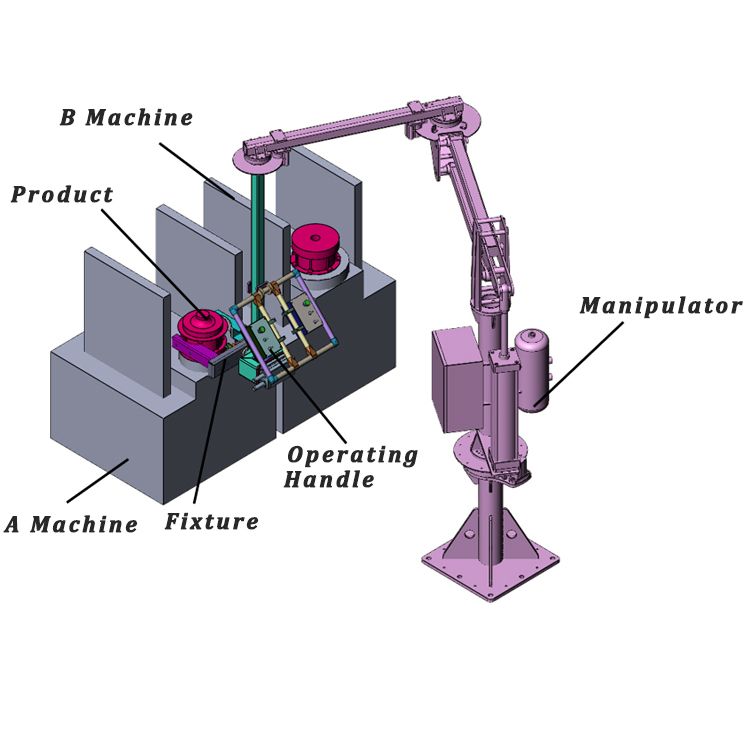
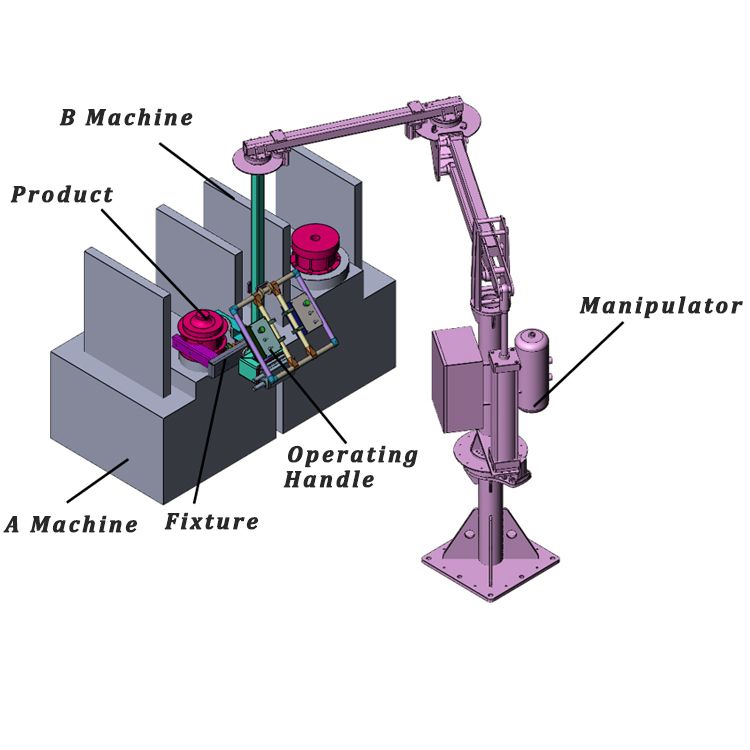
Avustetun manipulaattorin siirrettävyyttä varten yksinkertainen ratkaisu on asentaa avustetun manipulaattorin maadoitettu pylväs suureen teräslevyyn toimimaan vastapainona manipulaattorille ja kokonaiskuormitukselle. Sitten pussittamalla haarukka teräslevylle, yksikkö voidaan helposti siirtää mihin tahansa paikkaan trukilla. Kutsumme sitä liikkuvaksi tehoavusteiseksi manipulaattoriksi.
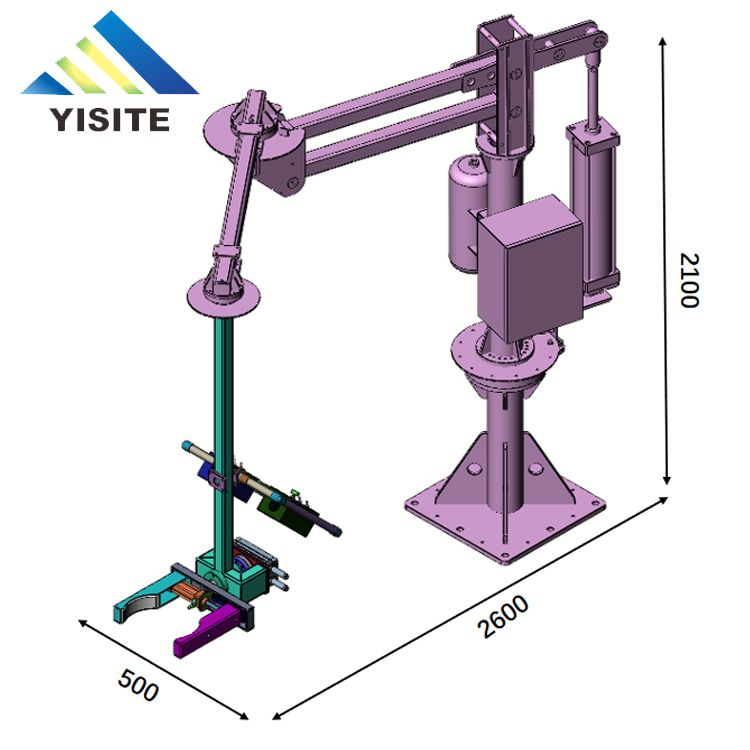
Tehoavusteinen manipulaattori, teline voidaan räätälöidä tarpeiden mukaan ja se soveltuu erilaisten työkappaleiden käsittelyyn ja lastaamiseen ja purkamiseen. Tuotteen paino on 50 kg, manipulaattorin työsäde on 2,5 metriä ja nostokorkeus 1,3 metriä.

meistä

Olemme ammattimainen räätälöityjen automaatiolaitteiden valmistaja. Tuotteitamme ovat kuormalavojen purkukone, keräily- ja paikkapakkauskone, lavaaja, robottiintegraatiosovellus, lastaus- ja purkumanipulaattorit, pahvinmuodostus, laatikoiden sulkeminen, lava-annostelija, käärintäkone ja muut automaatioratkaisut taustapakkaustuotantolinjalle.
Tehtaamme pinta-ala on noin 3500 neliömetriä. Teknisellä ydintiimillä on keskimäärin 5-10 vuoden kokemus mekaanisesta automaatiosta, mukaan lukien 2 konesuunnittelijaa. 1 ohjelmointiinsinööri, 8 kokoonpanotyöntekijää, 4 myynnin jälkeistä virheenkorjaushenkilöä ja 10 muuta työntekijää
Periaatteemme on "asiakas etusijalla, laatu ensin, maine ensin", autamme aina asiakkaitamme "lisäämään tuotantokapasiteettia, alentamaan kustannuksia ja parantamaan laatua" pyrimme olemaan koneautomaatioalan huipputoimittaja.
Kaapelivirtarobottimanipulaattori
| Malli | YST-125 | |
| mekaaninen rakenne | Avustettu manipulaattori | |
| suoritustapa | Puoliautomaatio | |
| Kuormalavapaino (ilman kiinnitystä) | 20 kg | |
| Liikeakseli | 3 akseli | |
| Käyttöalue | Z-akseli (ylös alas) | 1400mm |
| akseli 1 (Spin) | 0-300° | |
| akseli 2 (Spin) | 0-300° | |
| akseli 3 (Spin) | 0-300° | |
| Max pyörityssäde | 2000mm | |
| ruumiinpaino (ilman kiinnitystä) | 200kg | |
Tuotetiedot
1. Siirrettävässä tehoavusteisessa manipulaattorissa on täysi jousitustoiminto, ja toiminta on helppoa ja ilmaista;
2. Tehoavusteinen manipulaattori on valmistettu ergonomian periaatteiden mukaisesti, ja toiminta on mukavaa ja kätevää;
3. Liikkuvan tehoavusteisen manipulaattorin rakenne on modulaarinen ja ilmapiirin ohjaus on integroitu;
4. Liikkuva tehoavusteinen manipulaattori auttaa vähentämään työvoimakustannuksia 50 %, vähentämään työvoimaintensiteettiä 85 % ja lisäämään tuotannon tehokkuutta 50 %;
5. Liikkuva tehoavusteinen manipulaattori on räätälöity tuotteen kuormituksen ja käyttöiskun mukaan eri muodoilla eri tarpeisiin.









