
Tuotteet



imukuppilasia käsittelevä pneumaattinen manipulaattori
Lyhyt kuvaus:
Pneumaattinen manipulaattori, joka tunnetaan myös nimellä manipulaattori, tasapainonosturi, tasapainotehostin, manuaalinen kuormansiirtokone (yllä oleva lausunto ei ole ammattimainen, mutta on suosittu Kiinassa), on uusi, käytetään materiaalinkäsittelyyn ja asennukseen sekä voimalaitteiden työvoimaa säästävään toimintaan.

imukuppilasia käsittelevä pneumaattinen manipulaattori soveltaa voiman tasapainoperiaatetta, jotta käyttäjä voi työntää ja vetää painavaa esinettä vastaavasti, mikä voi tasapainottaa liikkuvan asennon avaruudessa. Raskas esine muodostaa kelluvan tilan nostettaessa tai laskettaessa, ja ei- käyttövoiman takaa kaasutie (käsittelyprosessin ja suunnittelukustannusten hallinta, käyttövoima on alle 3 kg arviointistandardina) käyttövoimaan vaikuttaa työkappaleen työkappaleen paino. Ilman ammattitaitoista käyttöä käyttäjä voi työntää ja vetää painavaa esinettä käsin ja asettaa painon oikein mihin tahansa asentoon tilassa.

meistä

Olemme ammattimainen räätälöityjen automaatiolaitteiden valmistaja. Tuotteitamme ovat kuormalavojen purkukone, keräily- ja paikkapakkauskone, lavaaja, robottiintegraatiosovellus, lastaus- ja purkumanipulaattorit, pahvinmuodostus, laatikoiden sulkeminen, lava-annostelija, käärintäkone ja muut automaatioratkaisut taustapakkaustuotantolinjalle.
Tehtaamme pinta-ala on noin 3500 neliömetriä. Teknisellä ydintiimillä on keskimäärin 5-10 vuoden kokemus mekaanisesta automaatiosta, mukaan lukien 2 konesuunnittelijaa. 1 ohjelmointiinsinööri, 8 kokoonpanotyöntekijää, 4 myynnin jälkeistä virheenkorjaushenkilöä ja 10 muuta työntekijää
Periaatteemme on "asiakas etusijalla, laatu ensin, maine ensin", autamme aina asiakkaitamme "lisäämään tuotantokapasiteettia, alentamaan kustannuksia ja parantamaan laatua" pyrimme olemaan koneautomaatioalan huipputoimittaja.
- 1. Rakenne: Täysi pneumaattinen tehomanipulaattori koostuu pääosin asennustallennusyksiköstä ja kiinnittimestä.2. Asennusperustus on jaettu: 1. Pylväs kiinteä 2. Pohja liikkuva 3. kattoripustus kiinteä 4Kattoripustus on liikkuva
3. Kiinnitys: Yleensä räätälöity asiakkaan toimittaman kappaleen ulkonäön koon mukaan.1. koukun tyyppi; 2. tartuntatyyppi; 3. kiristystyyppi; 4. sisäinen nousutyyppi; 5. hissin tyyppi; 6. pitotyyppi; 7. kahvan käännösmuunnos (kääntö 90° tai 180°) 0; 8. tyhjiöadsorptio; 9. Tyhjiöadsorptio-käännösmuunnos (kääntö 90° tai 180°) ja muut, erityisesti valitut ja kehitetyt ja suunnitellut, ovat saavuttaneet hyvän käyttövaikutuksen.
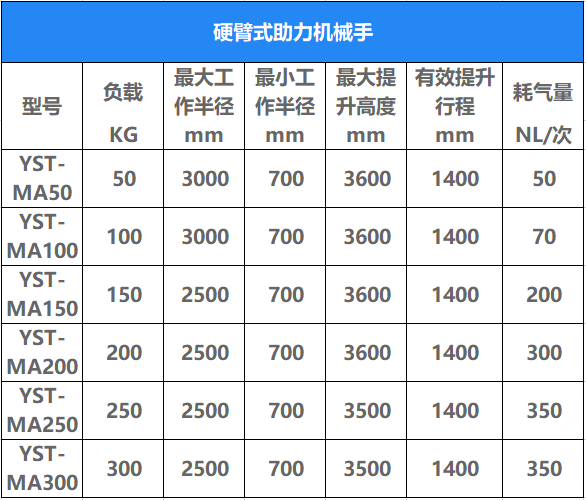
4. Isäntä: koostuu pääasiassa tasapainotetusta sylinteristä ja jäykästä monitoimikonsolista, ja tärkeimmät parametrit ovat nostokapasiteetti ja huoltosäde.
Tuotteen kuvaus
imukuppilasin käsittely Pneumaattiset manipulaattorit on suunniteltu toimimaan yli riippuvien kuormien kanssa. Tästä syystä ne ovat ehdottoman välttämättömiä teollisuuskoneiden lastaamiseen ja purkamiseen. Pneumaattisten lisävarusteiden ja erikoistarvikkeiden ansiosta osia ei voi vain nostaa, vaan myös pyörittää, kallistaa ja kääntää ylösalaisin tai yksinkertaisesti kallistaa niitä.
Tuotteen ominaisuudet
1. Täysi pneumaattinen tehomanipulaattori koostuu pääosin asennustallennusyksiköstä ja kiinnittimestä.
2. Asennusperustus on jaettu: 1. Pylväs kiinteä 2. Pohja liikkuva 3. kattoripustus kiinteä 4Kattoripustus on liikkuva
3. Kiinnitys: Yleensä räätälöity asiakkaan toimittaman kappaleen ulkonäön koon mukaan.1. koukun tyyppi; 2. tartuntatyyppi; 3. kiristystyyppi; 4. sisäinen nousutyyppi; 5. hissin tyyppi; 6. pitotyyppi; 7. kahvan käännösmuunnos (kääntö 90° tai 180°) 0; 8. tyhjiöadsorptio; 9. Tyhjiöadsorptio-käännösmuunnos (kääntö 90° tai 180°) ja muut, erityisesti valitut ja kehitetyt ja suunnitellut, ovat saavuttaneet hyvän käyttövaikutuksen.
4. Isäntä: koostuu pääasiassa tasapainotetusta sylinteristä ja jäykästä monitoimikonsolista, ja tärkeimmät parametrit ovat nostokapasiteetti ja huoltosäde.







